用于复健和义肢的驱动装置
掌控动作
爬楼梯、绑鞋带、拿叉子——通过机电一体化系统来模仿人类的动作过程,可以说是工程设计中最大的挑战之一。为了实现精确的动作,极富创造力的初创公司信赖maxon驱动系统的能力。


我们的产品建议
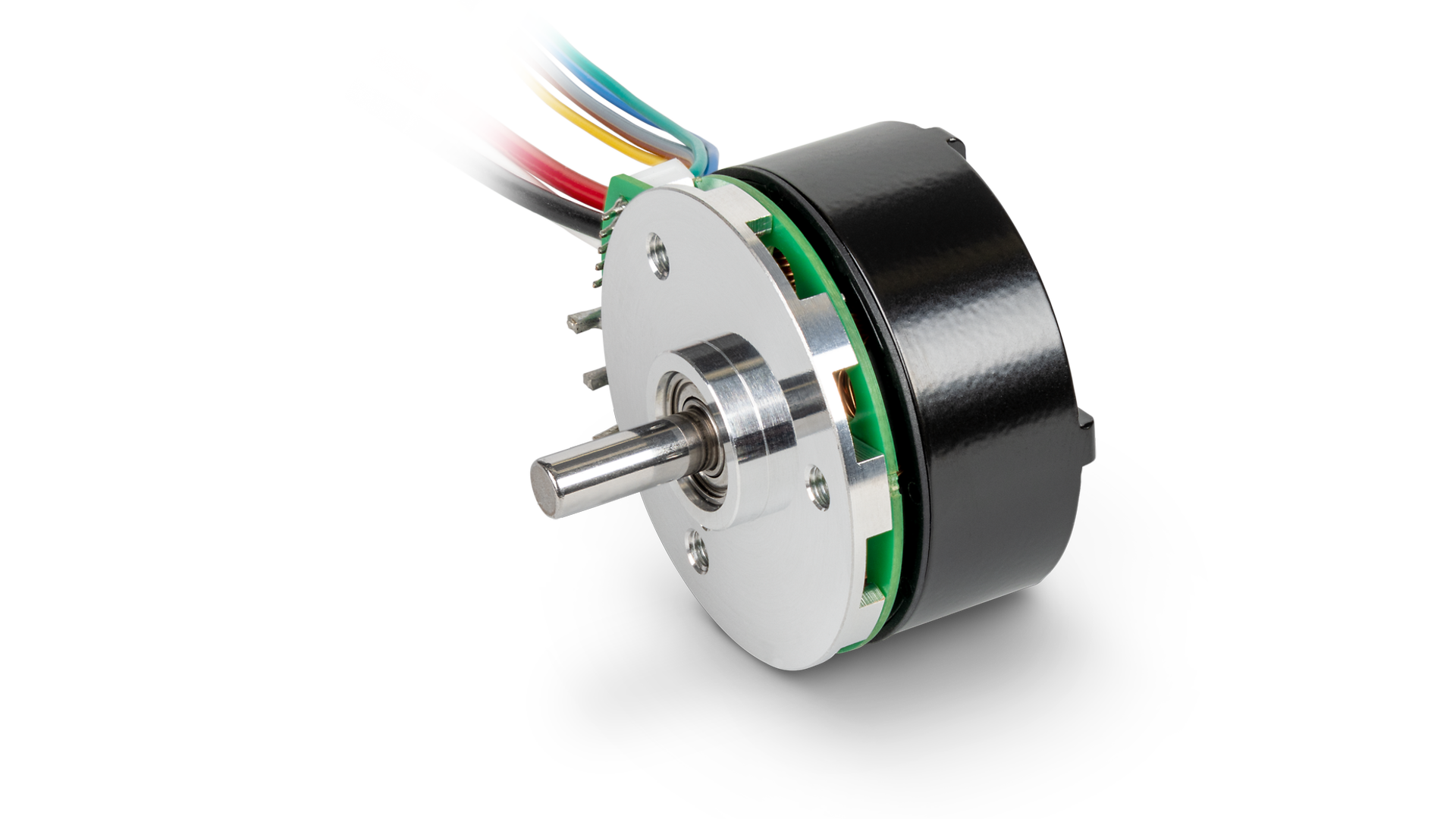
电机



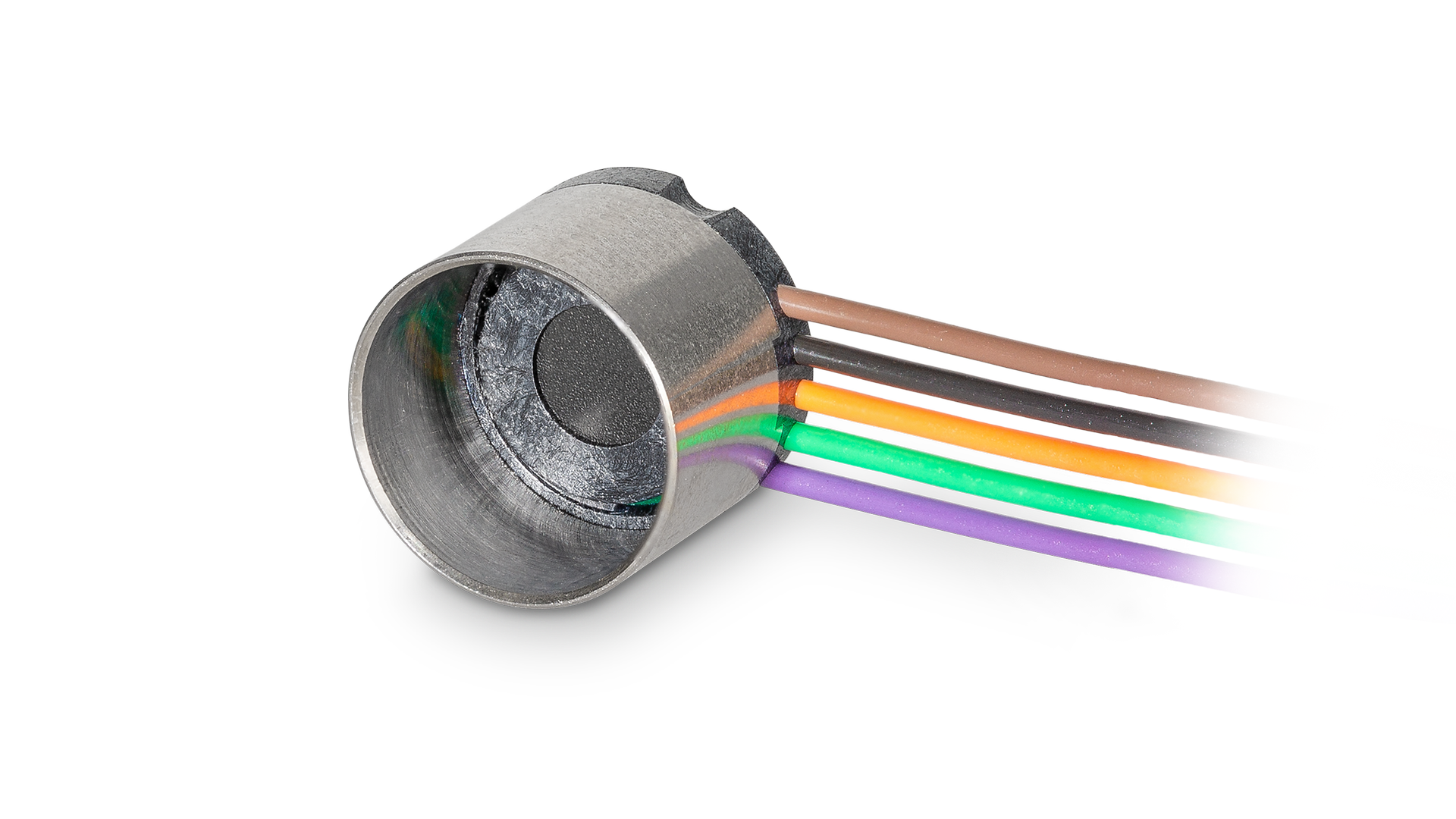
齿轮箱
我们的齿轮箱可提供最高的性能,并且重量轻、噪音低。如此便不会对义肢的性能带来不利影响,同时也可以提高用户的佩戴舒适度。

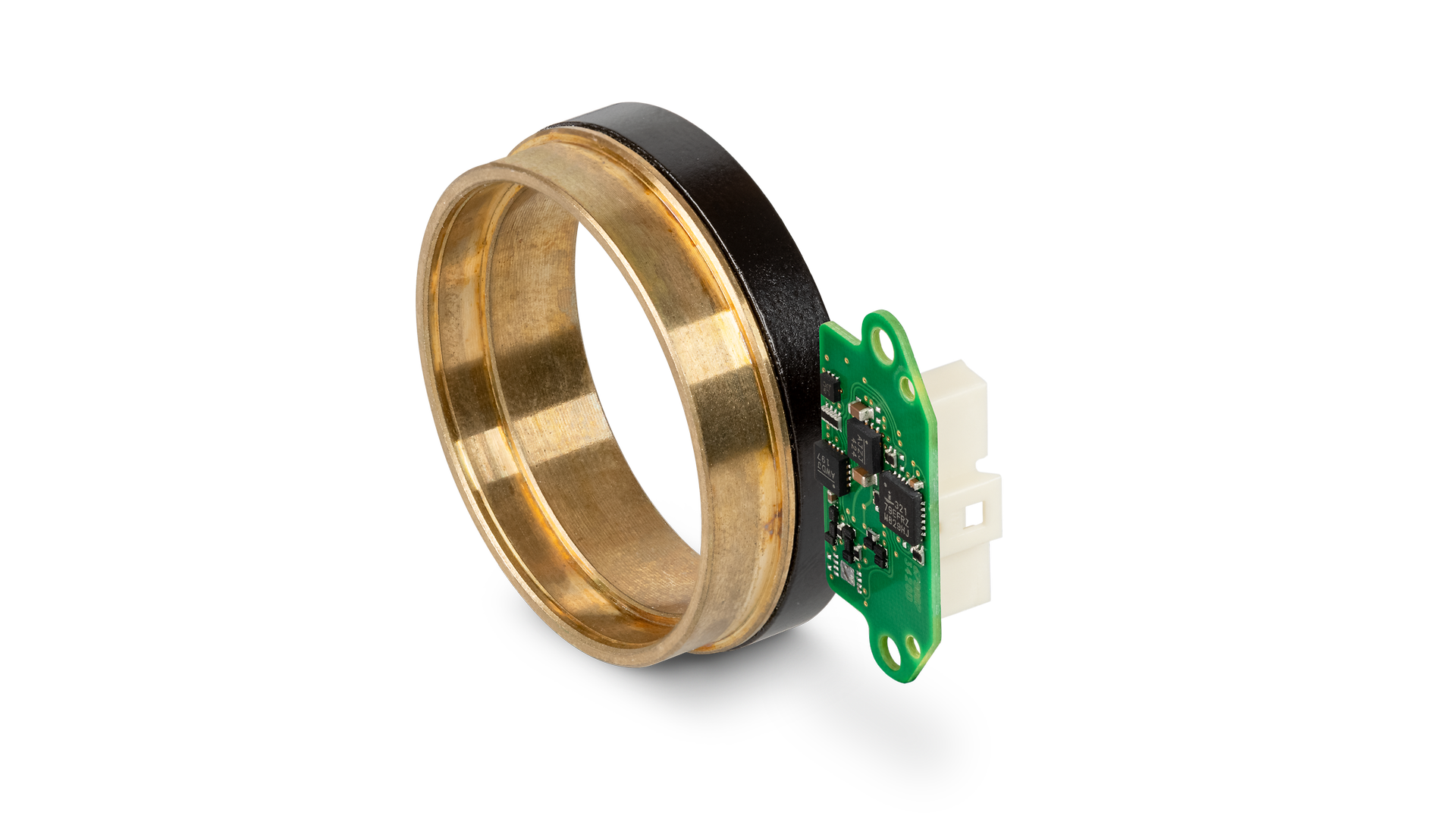
编码器
用于医疗的驱动装置解决方案
立即下载手册
欢迎初览医疗技术领域的各种可能应用,并进一步了解我们最重要的、针对高科技义肢或外骨骼的产品系列。





常见问题解答
齿轮箱回差有多大?
maxon齿轮箱可按照齿轮箱回差进行区分。在我们的目录中,标准齿轮箱的回差值会标注在相关产品页面上的平均回差之下。
是否有无回差的齿轮箱?
零回差齿轮箱指的是回差十分小的齿轮箱。我们目前正在研发一款回差非常小的maxon齿轮箱 (Cycloflex)。所谓的零回差齿轮箱也可以整合在Harmonic Drive中。
齿轮箱的旋转方向?
齿轮箱的旋转方向与应用无关(顺时针和逆时针)
齿轮箱可以反向旋转吗?
行星齿轮箱的设计主旨是高效率,因此在设计上不能反向旋转。在某些情况下,一级或两级齿轮箱可以反向旋转。但如果是三级齿轮箱,则不能反向旋转。所谓的“零回差”齿轮箱原则上也不能反向旋转。
maxon可以提供多大范围的编码器分辨率?
编码器分辨率从1 cpt到65536 cpt(RIO编码器)。另外也提供不同的绝对式编码器(单圈、多圈),分辨率最高可达19比特。
一台电机控制器上是否可以采用双回路解决方案/2个编码器?
是的。EPOS 4可以支持双回路模式(2个编码器)。
联系方式
您还有疑问?
我们的医疗专家团队很乐意为您提供帮助。
