Expert Blog
Repousser les limites de la robotique grâce à des systèmes d'entraînement de nouvelle génération


La robotique, un domaine en pleine mutation et en forte croissance, est un marché clé pour les actionneurs maxon. Dans cet article, Mario Mauerer, responsable du Business Development Robotique, partage sa vision de ce à quoi pourrait ressembler un système d'actionnement robotique de nouvelle génération.
Nous ne pouvons en aucun cas prédire l'avenir, mais nous pouvons extrapoler quelques tendances pour former une vision. Tout d'abord, imaginez que, très bientôt, les robots autonomes auront envahi pratiquement tous les aspects de la société. Les voitures autonomes et les robots de livraison sur trottoir ne sont qu'un début. Vos lettres et colis seront déposés et collectés par des essaims de robots. Des travailleurs équipés d'exosquelettes construiront des infrastructures avec l'aide de compagnons quadrupèdes. Un robot nettoiera joyeusement votre chambre d'hôtel (y compris les toilettes !). Des robots de garderie divertiront les enfants dans le bac à sable (et changeront leurs couches). Les pommes seront cueillies de manière autonome. Vous voyez le tableau. Je pense que ce monde deviendra réalité plus tôt que nous ne le prévoyons actuellement.
Le cœur de la robotique : les systèmes d'actionnement
Les systèmes d'actionnement, qui appliquent un couple de manière bien contrôlée pour créer un mouvement, constituent un élément central de tout robot. Les entraînements robotiques doivent être très denses en couple, profondément intégrés, fiables et facilement adaptables à la production. Soulignons certains aspects des systèmes d'entraînement de nouvelle génération qui faciliteront la transformation robotique en cours.
Tout d'abord, la sécurité sera essentielle. Des millions de robots autonomes fonctionneront dans des espaces partagés avec des humains (fragiles et vulnérables). Cela signifie que leurs entraînements doivent intrinsèquement offrir certaines fonctionnalités liées à la sécurité. La coupure de couple sécurisée, qui désactive les actionneurs en toute sécurité, n'est qu'un début et une première approche de base. À un certain moment, il sera nécessaire de garantir la sécurité du couple et du mouvement, ce qui constitue une toute nouvelle dimension de complexité. Actuellement, les technologies à l'origine de ces capacités en sont encore à leurs débuts.
Intégration : du « Lego industriel » aux systèmes homogènes
Les entraînements nécessiteront une intégration toujours plus poussée des sous-systèmes afin de fournir toutes les fonctions nécessaires dans un espace limité. Les « Lego industriels » ne seront plus possibles. Les limites des systèmes deviendront plus floues et interdépendantes. Les actionneurs deviendront des éléments structurels, et personne ne voudra (ni ne pourra) plus s'occuper des câbles ; la communication et le transfert d'énergie devront être combinés. Cette tendance à l'intégration sera rendue possible par de nouveaux matériaux et de nouvelles méthodes de production (comme c'est toujours le cas).
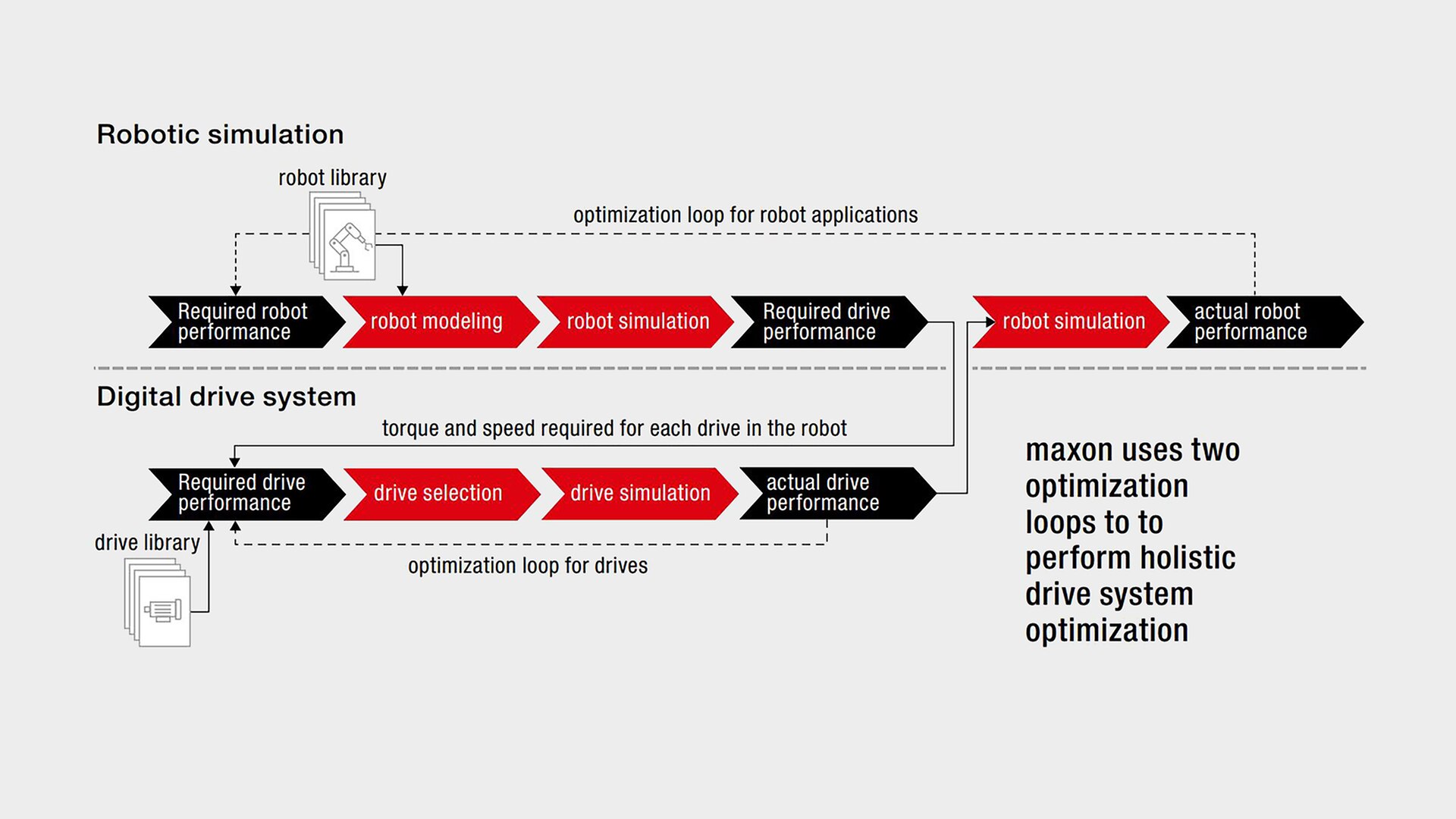
Les simulations avancées de systèmes sont un aspect qui commence déjà aujourd'hui à accélérer cette intégration profonde. Ces outils permettent une optimisation et une validation approfondies des systèmes. Nous voulons nous assurer qu'un roboticien puisse construire un robot qui fonctionne tout simplement, car il aura suffisamment simulé tous les capteurs, actionneurs et systèmes de contrôle au préalable. La création de nouveaux robots devient vraiment facile.
Calcul et intelligence au niveau des articulations
Le prochain changement de paradigme concerne le calcul. Tout d'abord, l'apprentissage automatique est un catalyseur évident. Des modèles ou algorithmes avancés seront exécutés directement sur les actionneurs et remplaceront les topologies de contrôle traditionnelles, basées sur des boucles et en cascade, grâce à leur capacité à traiter des données plus complexes et plus diverses.
Cela pourrait également impliquer que les actionneurs intégreront beaucoup plus de capteurs, tels que des IMU ou des microphones, afin de permettre une maintenance prédictive ou un comportement à sécurité intégrée au niveau des articulations. Ces capteurs faciliteront également l'apprentissage adaptatif, dans lequel les systèmes réagissent de manière autonome aux conditions changeantes, telles que l'usure ou les défauts, non pas via des comportements préprogrammés, mais grâce à une connaissance intrinsèque de leur architecture, de leur interface et de leur objectif.
Un deuxième aspect du calcul est sa distribution spatiale. Je pense que le système de calcul d'un robot deviendra plus centralisé, traitant toutes les données des capteurs à un seul endroit. Un point de vue contraire suggère que la capacité de calcul pourrait être davantage répartie sur l'ensemble d'un robot, y compris les actionneurs. Le temps nous dira quelle approche sera dominante (le cas échéant).
Néanmoins, toutes les données créées par les systèmes d'actionnement seront collectées et utilisées soit localement et directement pour le contrôle, soit pour la maintenance préventive de robots individuels ou de flottes entières. Les progrès futurs en matière de connectivité (sans fil) permettront le transfert de quantités massives de données, et potentiellement même le contrôle en temps réel des robots à partir du « cloud ».
Durabilité et réflexion sur le cycle de vie
Enfin, un autre aspect émerge des systèmes d'entraînement plus complexes concerne les considérations relatives au cycle de vie. Les actionneurs doivent non seulement être produits de manière durable, mais aussi fonctionner avec un minimum ou sans entretien et avec un rendement élevé. Les flottes de millions de robots, dont beaucoup sont alimentés par batterie, doivent faire preuve d'un haut degré de fiabilité et ne nécessiter qu'un entretien minimal, afin de stimuler davantage leur adoption et de réduire le coût total de possession.
Cela a des implications intéressantes pour le modèle économique des fournisseurs de systèmes d'entraînement, que je vous encourage, par souci de concision, à discuter avec votre grand modèle linguistique préféré.
Humanoïdes et au-delà : systèmes complexes, actionneurs simples
Les robots humanoïdes sont particulièrement en vogue ces derniers temps. Ce domaine a connu une explosion de nouveaux systèmes provenant de divers fabricants et instituts de recherche au cours des deux ou trois dernières années seulement. Pour moi, un humanoïde est simplement une certaine expression d'un robot mobile autonome capable d'effectuer des manipulations ou des interactions. La complexité ne réside pas dans la forme du robot, mais dans la maîtrise holistique de la complexité d'un tel système.
Ces robots, qu'ils aient la forme d'un humanoïde ou d'un quadrupède (ou toute autre forme, par exemple en équilibre sur une sphère, etc.), utilisent des capteurs de pointe, des méthodes de contrôle avancées et du matériel complexe, y compris des actionneurs apparemment « simples » qui effectuent la tâche banale de « rotation » (en réalité, ces systèmes sont des facilitateurs complexes et sont étroitement intégrés au logiciel et au système de contrôle du robot).
La fiabilité et la fonctionnalité de ces robots autonomes sont encore largement à prouver, et des sujets tels que la manipulation mobile restent des défis de recherche non résolus. Les premières applications commerciales font lentement leur apparition, par exemple dans les applications logistiques et les environnements hautement contrôlés. Il faudra encore un certain temps avant que de tels systèmes – qu'ils aient une forme humanoïde, centaure ou quadrupède n'aura pas vraiment d'importance – soient largement déployés dans des environnements véritablement non structurés (par exemple, pour distribuer notre courrier).
Ce qui est certain, c'est que les actionneurs et le matériel doivent commencer à être réduits à une complexité minimale, c'est-à-dire atteindre des coûts faibles et une fiabilité élevée, dès aujourd'hui. Sinon, la croissance massive et le déploiement économiquement viable ne seront pas possibles.
Une révolution robotique en marche
Je pense sincèrement que nous sommes dans les premières phases d'une révolution robotique plus large. Les systèmes d'entraînement de nouvelle génération rendront cette profonde transformation sociétale encore plus possible, et j'espère sincèrement que maxon pourra participer activement à cette aventure passionnante pour l'humanité.
Brochure
Robotique

Des solutions d'entraînement de 0.0002 à 120 Nm. L'environnement industriel devient plus rapide, plus précis et plus sûr. Cela impose des exigences élevées aux machines.