maxon Story
用于复健训练的医疗外骨骼


实现的目标是提供一种智能、由数据驱动的治疗方法,用于治疗神经和肌肉骨骼运动障碍。
Harmonic Bionics的主要目标是通过设计智能技术,在神经系统和肌肉骨骼运动障碍的治疗中提供由数据驱动的治疗方案,从而为患者和护理服务提供方提供支持。出于此目标,这家公司负责全面设计和组装Harmony SHR™双侧上肢外骨骼产品。
通过早期干预、功能性重复动作以及意向治疗,Harmony SHR能够帮助用户提高上肢康复的效率和有效性。作为公司的旗舰产品,Harmony SHR可以在三个实践领域内提供独特的价值:神经科学和运动科学研究、运动障碍评估和复健。Harmonic Bionics选择采用商用现货 (COTS) 部件,并根据每一台执行器的要求将这些部件集成到他们的各种机器人执行器中,以简化产品的设计工作。但有时,公司不得不在设计阶段做出一些小小的妥协,例如可能必须在执行器尺寸与负载能力/重量之间,以及在最大转矩和转矩灵敏度之间作出取舍。他们推出的最终产品非常强大,不仅可以帮助患者进行复健训练,而且产品本身不会过重,也不会因为操作复杂而增加使用难度。
在各种机械臂应用中,一般来说必须将人员与机械臂隔离开,以防止机器人在移动时造成人员伤害。市面上大多数机械臂的设计都无法与人安全互动,它们在执行通过编程设定的任务时,无法检测到在移动路径上或者周围是否有人员活动。因此,典型的机器人与人互动时可能非常危险,尤其是在物理治疗应用中。但这对Harmony SHR来说却完全不是问题,它的设计对力非常敏感,并且通过用户输入的力进行控制,而不像大多数机械臂那样采用位置设定点。
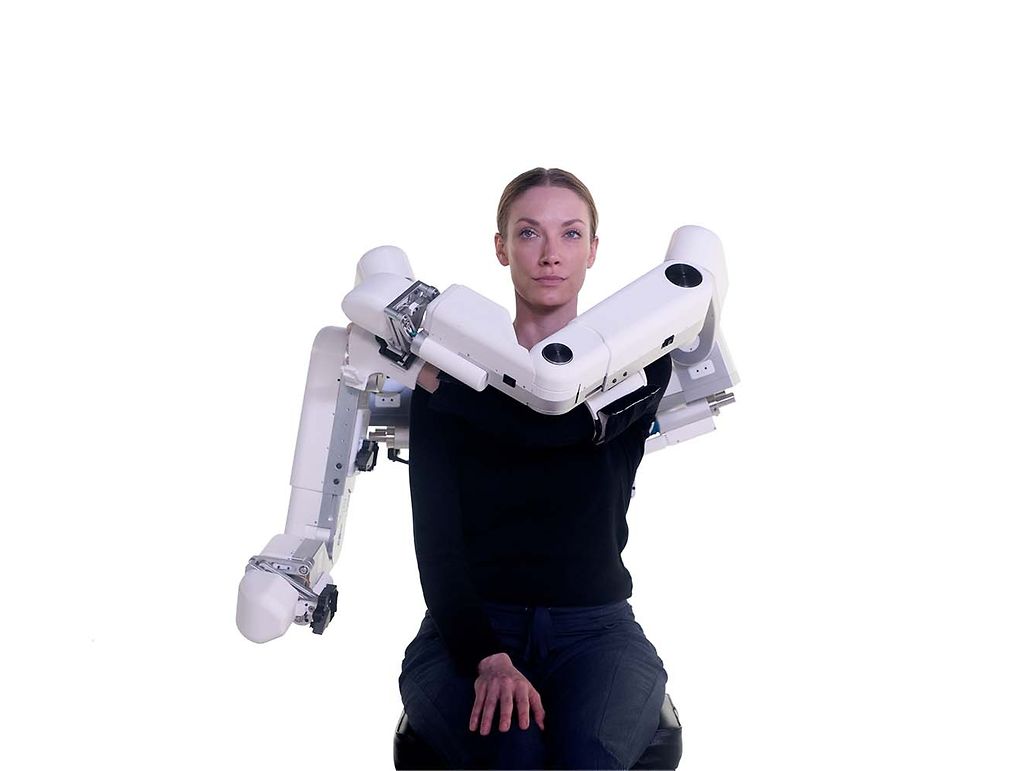
图1:对于复健训练来说,准确度并不那么重要,尤其是在练习时。
为了协助患者练习,更重要的是机器人应该对病患施加正确的力,而不是将他们精确定位(见图1)。在设计机器人时充分考虑到合规性,因此即使对机器人施加很小的力,也会使机器人移开、减速或完全停止。这项特性使得机器人外骨骼特别安全,在穿戴外骨骼以及在外骨骼周围工作时都不需要担心。
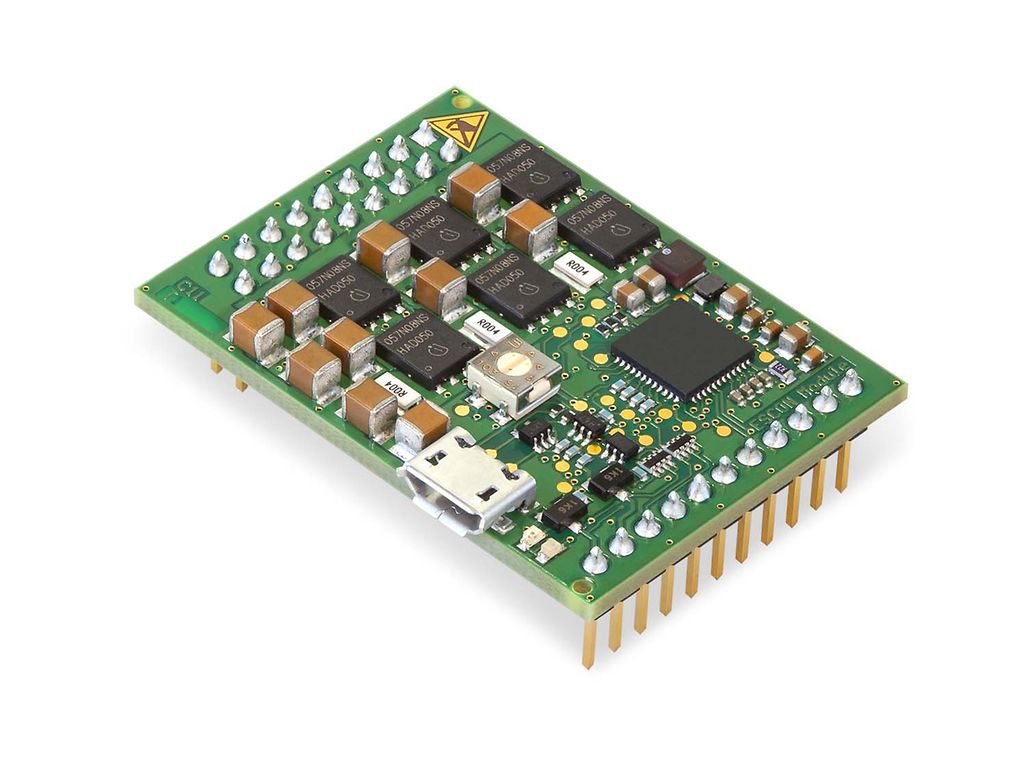
图2:maxon强大的紧凑型ESCON控制器为Harmony SHR外骨骼提供额外的优势。
为了获得这种较高的力灵敏度,必须重新设计传统的机器人执行器。Harmonic Bionics研发出一种机器人执行器并已获得专利,采用以机械方式隔离所有外界负载的称重传感器。这使得每个称重传感器都只能感应到机器人装有传感器的关节所施加的力,但不会感应到其他关节的施力,进而最大限度地提高称重传感器的传感精度。maxon制造的ESCON控制器尺寸紧凑,易于电气和物理集成(见图2)。我们发现软件也易于使用。电机的数据表能提供非常丰富的信息,从而进一步简化电机的集成。我们几乎不需要修改我们的电机选择,因为数据表可以帮助我们在第一时间做出正确的电机决策。
Harmony SHR外骨骼有两种执行器选择,一种是具有转矩和角度感应输出的旋转执行器,可以协助患者运动;一种是具有位置反馈的线性执行器,用于根据患者的需要调整机器人的大小。外骨骼设计旨在针对患者的运动能力提供客观的评估。这套系统包含80多个传感器,每秒可记录2,000次测量结果,因此能够精确测量多个参数,包括运动范围、产生的力量以及重复次数。
运动系统中采用数台由maxon设计和制造的电机。maxon能提供满足系统众多独特要求的电机。例如,EC盘式电机结构紧凑,非常适合外骨骼的紧凑尺寸,同时又能提供所需的高转矩输出(见图3)。盘式电机也可以搭配角度传感器。
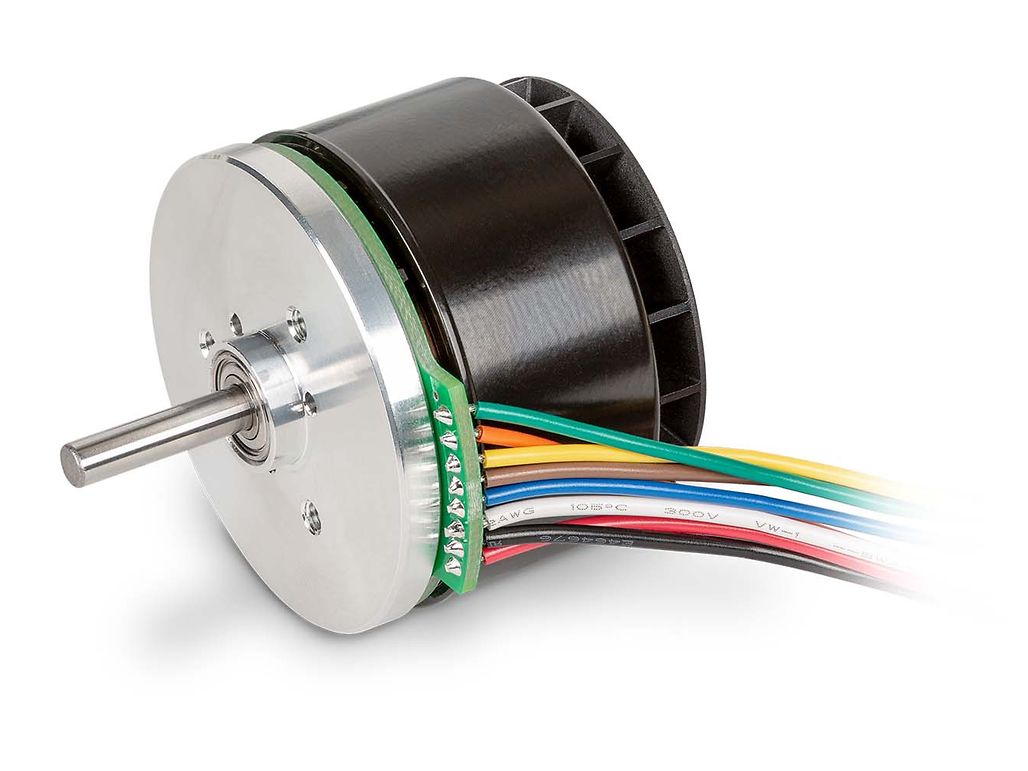
图3:maxon EC 60 flat盘式电机,结构紧凑且转矩输出高。
选择EC 60 flat盘式电机的原因在于其外径与谐波齿轮驱动装置的外径相似,并且轴向尺寸紧凑。maxon EC 60 DC盘式电机的轴连接到一个尺寸17的谐波齿轮驱动装置的谐波发生器上,选择这款谐波齿轮驱动装置的原因在于它的轴向尺寸紧凑并且具有较高的转矩能力。谐波齿轮驱动装置齿轮减速机完全符合公司设计所需的高减速比、低空回和高转矩能力的要求。
maxon电机的定子安装在谐波齿轮驱动装置的刚轮上。谐波齿轮驱动装置的柔轮连接到由交叉滚子轴承支撑的输出轴上,这个轴承可支撑所有非执行器转矩输出的负载。由于交叉滚子轴承支撑其他负载,因此作用在负载传感器上的唯一负载就是负载传感器的转矩输出。
maxon电机、输出轴和谐波齿轮驱动装置组件可以在交叉滚子轴承中自由旋转。谐波齿轮驱动装置的刚性齿轮和maxon电机的定子上安装有一个支架。这个支架上又安装有一个负载传感器,因此可以通过负载传感器测量整个组件的输出转矩。
谐波齿轮驱动装置与maxon电机轴的校准情况对于执行器的使用寿命至关重要。即使是轻微的失准也会导致整个机构过早磨损或失灵。因此,在加工部件时会使平行度误差保持在大约20微米范围内,同心度误差保持在大约30微米范围内,从而确保刚性齿轮与maxon电机对齐。机器人内部执行器的总占用空间约为直径80 mm、长度90 mm。每个执行器所使用的加工部件都采用抗疲劳铝合金制成,受压特别高之处更是采用5级钛金属。
整个执行器的输出转矩约为30 Nm,输出峰值超过100 Nm。执行器连接在一个极其灵敏的称重传感器上,传感器的分辨率小于10 mNm。每个执行器的设计使用寿命超过3百万转。
结论
Harmony SHR中使用的执行器设计成熟,预计未来几乎不需要改进。据公司称,他们不太可能在未来的修订版中改变任何COTS部件,尤其是maxon部件。maxon的DC电机易于定制,而且该公司还提供用在旋转执行器中的低空回齿轮减速机,以及用于制造紧凑型旋转执行器的小直径有刷DC电机加行星齿轮箱组合。该公司的丝杠齿轮减速机也可用于线性执行器应用。这一切都表明maxon能提供应用所需的所有电机和控制器,从而成为Harmonic Bionics的可靠单一来源供货商。
Image Copyrights
Harmonic Bionics